– Bassanetti, T., Escobedo, R., Cezera, S., Blanchet, A., Sire, C. & Theraulaz, G. 2023. Cooperation and deception through stigmergic interactions in human groups. Proceedings of The National Academy of Sciences USA, 120 (42), e2307880120.
– Dorigo, M., Theraulaz, G. & Trianni, V. 2021. Swarm robotics: past, present and future. Proceedings of the IEEE, 109: 1152-1165.
– Escobedo, R., Lecheval, V., Papaspyros, V., Bonnet, F., Mondada, F., Sire, C., & Theraulaz, G. 2020. A data-driven method for reconstructing and modelling social interactions in animal groups. Philosophical Transactions of the Royal Society of London – Serie B., 375, 20190380.
– Gómez-Nava, L., Bon, R., Peruani, F. 2022. Intermittent collective motion in sheep results from alternating the role of leader and follower. Nature Physics, 18, 1494-1501.
– Heyde A, Guo L, Jost C, Theraulaz G, Mahadevan L. 2021. Self-organized Biotectonics of termite nests. Proceedings of The National Academy of Sciences USA, 118 (5), e2006985118, doi: 10.1073/pnas.2006985118
– Lei, L., Escobedo, R., Sire, C., Theraulaz, G. 2020. Computational and robotic modeling reveal parsimonious combinations of interactions between individuals in schooling fish. Plos Computational Biology, 16: e1007194.
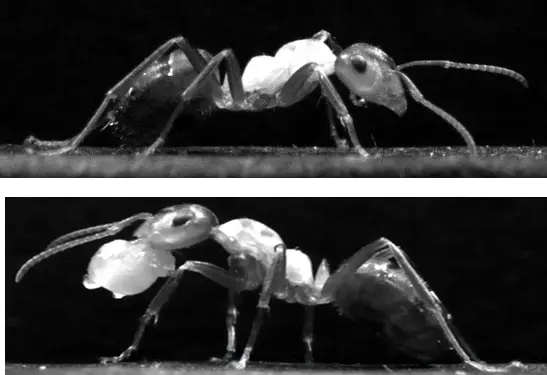
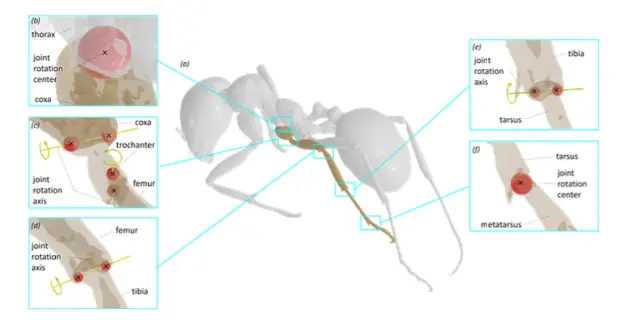
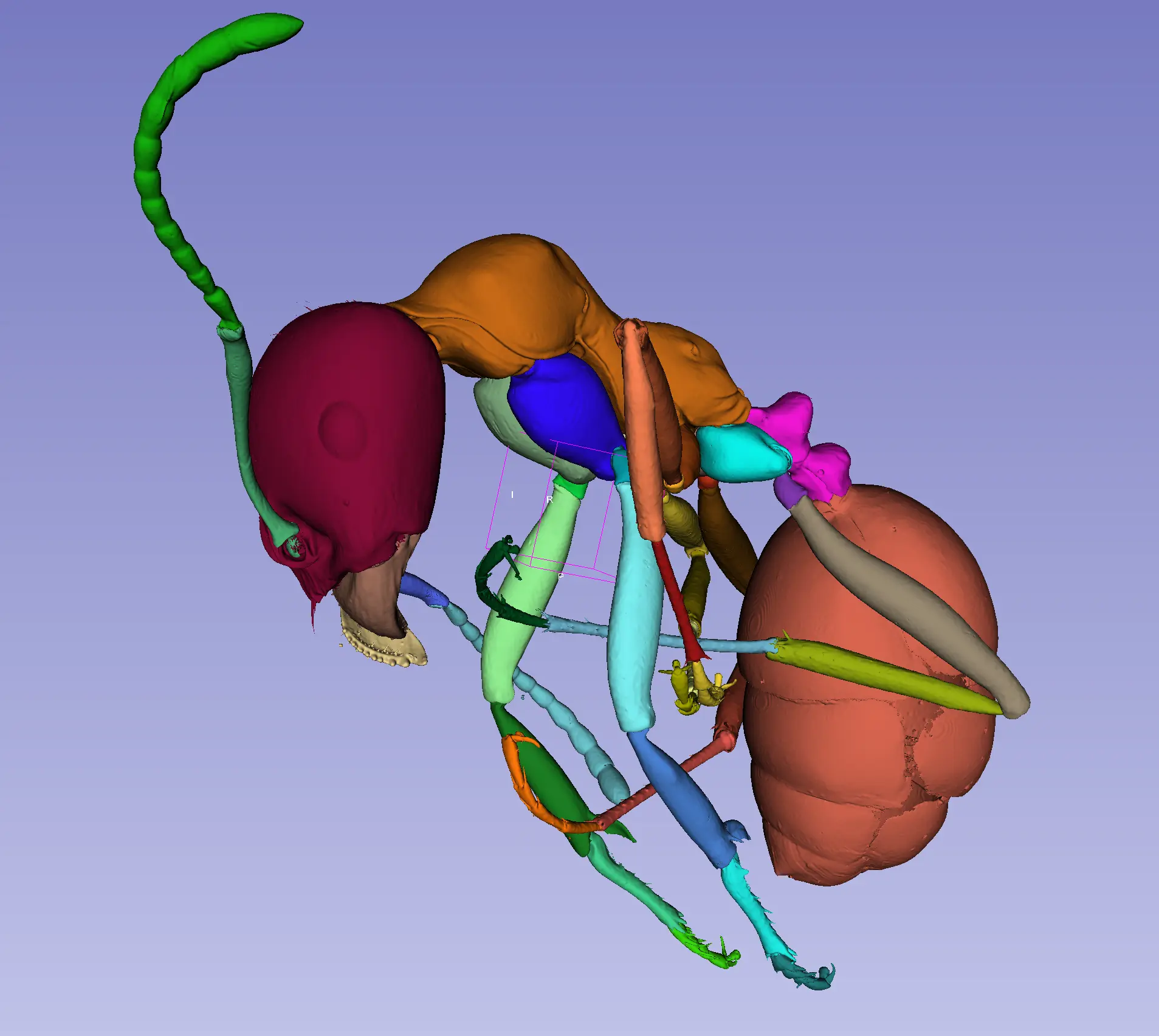
– Merienne, H., Latil, G., Moretto, P., Fourcassié, V. 2020. Walking kinematics in the polymorphic seed harvester ant Messor barbarus: influence of body size and load carriage. Journal of Experimental Biology, 223, jeb.205690.
– Xue, T., Li, X., Lin, G., Escobedo, R., Sire, C., Han, Z., Chen, X. & Theraulaz, G. 2023. Tuning social interactions’ strength drives collective response to light intensity in schooling fish Plos Computational Biology, 19(11):e1011636.