


- Institute
- Research topics
- Organization
- Platforms
- Services
- Europe/International
- Science outreach
- Agenda
- Directory
- Access
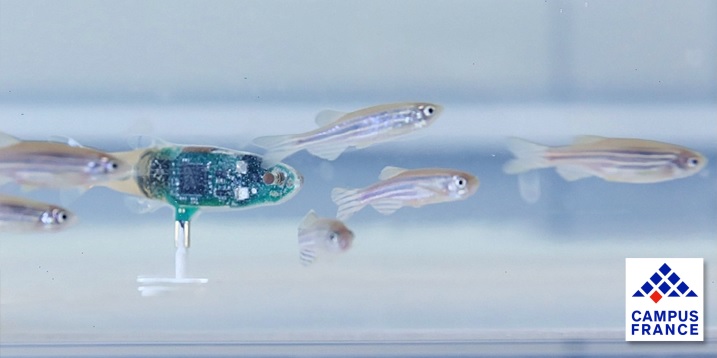
Using a robotic platform to study the interactions between individual fish in rummynose tetras and zebrafish (2019-2022).
The main aim of this project is to test the ability of deep-learning techniques to reconstruct the interactions involved in the coordination of collective movement in two species of fish, the rummy-nose tetra (Hemigrammus rhodostomus) and the zebra fish (Dano rerio) and to compare these methods with those that we have developed in our team; and in particular we will use a closed-loop system to acquire data on the behavior of real fish to feed in real time a mathematical model for individual fish motion that controls the behavior of a robotic fish which interact with the real fish. And we will use this setup to compare the models of the social interaction that are produced by both methods.
People involved in CAB/CRCA: R. Escobedo, M. Moreau, G. Theraulaz (Project Leader).
Project funded by Campus France (Program Germaine de Staël). Collaboration with EPFL (Robotic Systems Lab) and the Laboratory of Theoretical Physics (CNRS, UPS).
Follow us 
Université Paul Sabatier
118 Route de Narbonne
31062 TOULOUSE Cedex
France
05 61 33 58 00


